微信公众号

手机端

搜索




编译/VR陀螺
近日,剑桥大学、牛津大学和伦敦大学学院的研究人员宣布开发出一种专为汽车平视显示器设计的AR全息系统,该系统利用激光雷达(LiDAR)点云投射4K视频。这项技术通过显示实时3D全息图像,在尺寸和距离上与现实世界中的物体保持一致,为驾驶员提供潜在道路危险的全面视图,从而大大提高了道路安全性。
 图源:Advanced Optical Materials
图源:Advanced Optical Materials
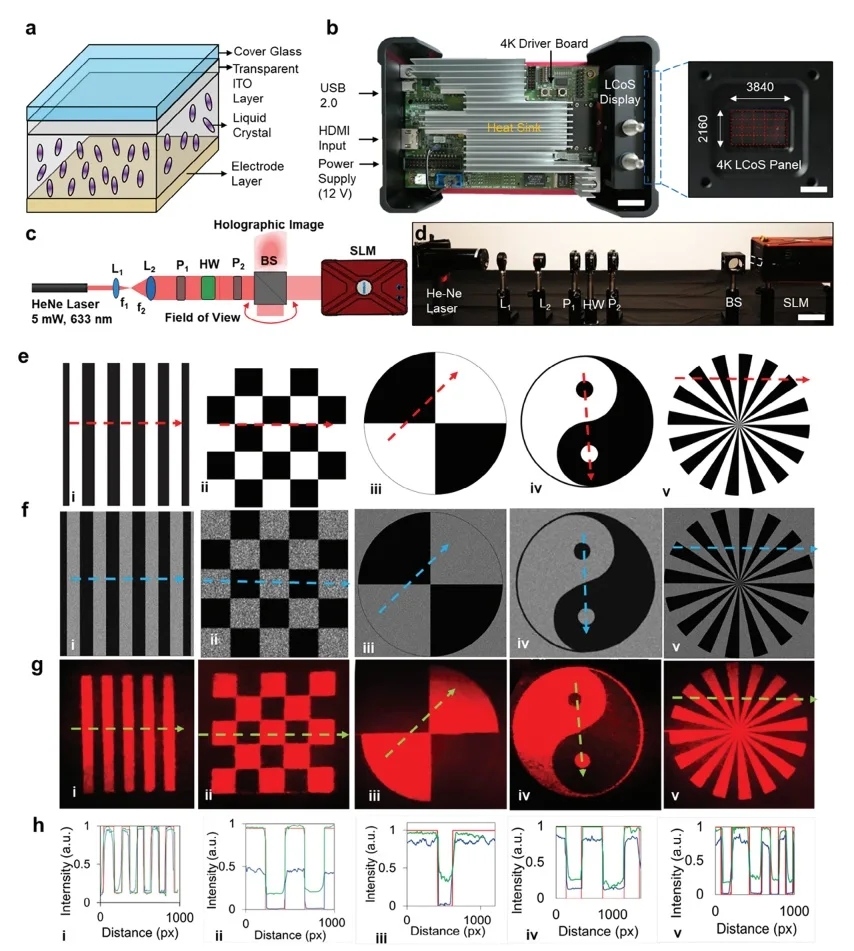
如上图所示,根据激光雷达点云数据生成 CGH 的光学装置,a) LCoS的原理基于液晶的排列。b) SLM 的组件由光电元件组成。比例尺:1 厘米。插图显示了LCoD面板。插图比例尺:5毫米。c) 光学投影系统包括4K SLM、He-Ne激光器、非球面透镜 (L1)、聚焦透镜 (L2)、偏振片 (P1-2)、半波板 (HW) 和分束器(BS)。e)分辨率图目标:线条、棋盘格、Secchi盘、阴阳图和西门子星状图,用于校准设备。f) 计算机生成的分辨率目标全息图。虚线显示分析区域。g) 重放解析目标的字段结果。h) 原始目标、CGH生成的目标和回放场结果的强度-距离图。
该系统利用光探测和测距(LiDAR)数据转换成详细的3D图像,并利用GPU加速计算,以比传统CPU处理更快的速度创建全息图像。这就提供了一个增强的道路视图,保持驾驶员的注意力,大大降低了由于人为失误造成事故的风险。
与投影到挡风玻璃一小部分的现有二维平视显示器不同,这项技术能让驾驶员的眼睛始终专注于路面。3D投影可从驾驶员视野的任何角度提供危险信息,而不会分散注意力或让人不知所措。
 图源:Advanced Optical Materials
图源:Advanced Optical Materials
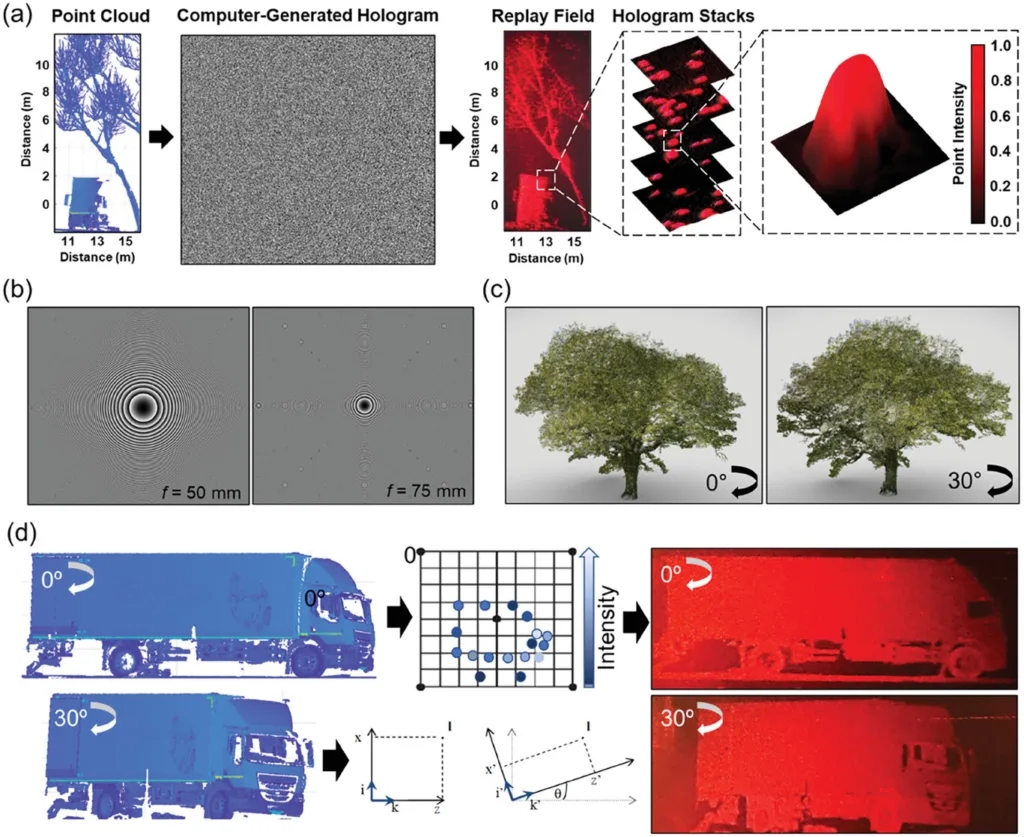
如上图所示,全息设置的深度信息,可在回放场中重新创建360°浮动3D对象。a)使用分离算法提取的点云数据,经过后处理后形成CGH和回放场结果中的强度曲线。每个点都分配有一个强度值。b)作为后处理程序的一部分,光学聚焦透镜被简化为虚拟菲涅尔透镜。虚拟菲涅尔透镜的焦距为f=50毫米和f=75毫米。 c) LiDAR对象旋转,深度信息为像素强度,对象的深度信息将作为360°旋转的完全可评估障碍物显示给驾驶员。旋转过程显示为0°和 30°。d)提取的LiDAR对象的3D对象旋转及其相应的回放场结果:0°时显示的LiDAR卡车、LiDAR对象的强度图、回放场结果;3D物体绕y轴旋转、旋转30°时的卡车LiDAR图像以及回放场结果。
研究人员使用激光雷达捕捉极其详细的扫描数据,单个物体的数据点高达40万个。专门的数据处理技术只提取基本的信息,实时生成全息图。这样就可以对繁忙、不断变化的街道上的潜在障碍物进行360度评估。
收集到的数据还可以通过云存储和共享,创建一个众包平台,为经过该区域的所有车辆提供实时危险感知。
研究人员目前正在与谷歌合作,在实际车辆中测试该系统,道路试验可能于2024年开始。该团队的目标是开发一个具有包容性的系统,以提高所有道路使用者的安全。
来源:displaydaily
投稿/爆料:tougao@youxituoluo.com
稿件/商务合作: 林南(微信 19250561593) 六六(微信 13138755620)
加入行业交流群:林南(微信 19250561593)

元宇宙数字产业服务平台
下载「陀螺科技」APP,获取前沿深度元宇宙讯息


























.JPEG)