微信公众号

手机端

搜索





[来自Vuforia官网]
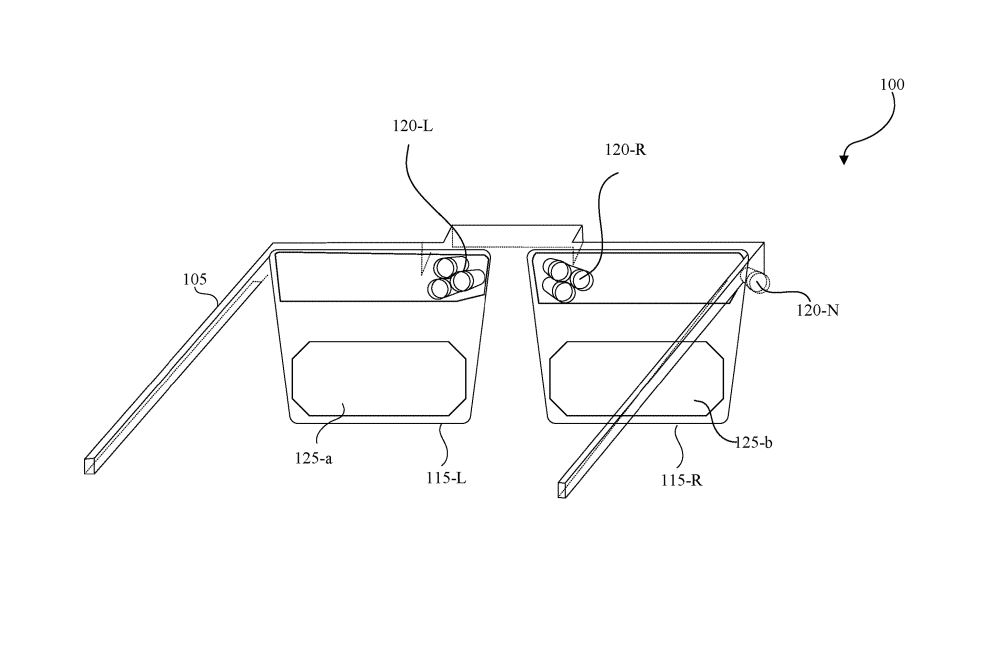
然而,同样基于摄像头,HoloLens却可以检测整个真实立体空间,并重建三维场景。厉害吧!这当然得益于HoloLens上的多种传感器了。 HoloLens上有4个环境感知摄像头、1个深度摄像头、1个 IMU(惯性测量单元)。 这些传感器分别都起什么作用呢?为了让你更直观的了解到,我们可以先做个小测试。
首先,我们把环境感知摄像头和深度摄像头都遮住。只让IMU起作用。
这些传感器分别都起什么作用呢?为了让你更直观的了解到,我们可以先做个小测试。
首先,我们把环境感知摄像头和深度摄像头都遮住。只让IMU起作用。
 通过Windows Device Portal的3D View查看到如下结果。这个时候HoloLens只能知道方向,不能知道相对位置偏移,也不能对周围环境建模。可以看出IMU负责感应设备的方向。
通过Windows Device Portal的3D View查看到如下结果。这个时候HoloLens只能知道方向,不能知道相对位置偏移,也不能对周围环境建模。可以看出IMU负责感应设备的方向。
 然后,我们把4个环境感知摄像头遮住,只露出深度摄像头。
然后,我们把4个环境感知摄像头遮住,只露出深度摄像头。
 结果和上面一样。还不知道相对位置偏移,也没有对周围环境建模。可以看出深度摄像头对空间建模并不会单独起作用。
接着,我们把深度摄像头遮住,只露出4个环境感知摄像头,分别在房间三个位置扫描周围环境。
结果和上面一样。还不知道相对位置偏移,也没有对周围环境建模。可以看出深度摄像头对空间建模并不会单独起作用。
接着,我们把深度摄像头遮住,只露出4个环境感知摄像头,分别在房间三个位置扫描周围环境。
 结果下图所示。每个位置建模形状接近球体,构建的三维环境模型是不正确的。但三个扫描的位置是正常的,所以这个时候,HoloLens是可以感知在真实空间中的相对位移和朝向角度。可以看出环境感知摄像头负责感应设备相对位置的偏移,但不会对周围环境建模。HoloLens的定位并不依赖深度摄像头。
结果下图所示。每个位置建模形状接近球体,构建的三维环境模型是不正确的。但三个扫描的位置是正常的,所以这个时候,HoloLens是可以感知在真实空间中的相对位移和朝向角度。可以看出环境感知摄像头负责感应设备相对位置的偏移,但不会对周围环境建模。HoloLens的定位并不依赖深度摄像头。
 最后,我们什么传感器也不遮,看看正常情况,如下图所示。HoloLens既可以感知在真实空间中的相对位移和朝向角度。又可以对周围环境建模。可以看出深度摄像头需要依赖环境感知摄像头去认知还原周围环境。
最后,我们什么传感器也不遮,看看正常情况,如下图所示。HoloLens既可以感知在真实空间中的相对位移和朝向角度。又可以对周围环境建模。可以看出深度摄像头需要依赖环境感知摄像头去认知还原周围环境。
 从上面的小测试里,你应该可以大致了解了这三种传感器的作用,IMU感应HoloLens的方向,环境感知摄像头感应HoloLens相对位置的偏移,深度摄像头感知HoloLens周围环境。IMU和4个环境感知摄像头与最开始说的“我在哪儿”问题有关。IMU和4个环境感知摄像头以及深度摄像头与“我周围有什么”问题有关。
知道了传感器的作用,接下来就可以深究传感器是如何解决这两个问题的。具体内容我们在下篇揭晓。
相关链接:
HoloLens中SLAM技术揭秘(下)
来源:微软HoloLens
关注微信公众号:VR陀螺(vrtuoluo),定时推送,VR/AR行业干货分享、爆料揭秘、互动精彩多。
从上面的小测试里,你应该可以大致了解了这三种传感器的作用,IMU感应HoloLens的方向,环境感知摄像头感应HoloLens相对位置的偏移,深度摄像头感知HoloLens周围环境。IMU和4个环境感知摄像头与最开始说的“我在哪儿”问题有关。IMU和4个环境感知摄像头以及深度摄像头与“我周围有什么”问题有关。
知道了传感器的作用,接下来就可以深究传感器是如何解决这两个问题的。具体内容我们在下篇揭晓。
相关链接:
HoloLens中SLAM技术揭秘(下)
来源:微软HoloLens
关注微信公众号:VR陀螺(vrtuoluo),定时推送,VR/AR行业干货分享、爆料揭秘、互动精彩多。
投稿/爆料:tougao@youxituoluo.com
稿件/商务合作: 林南(微信 19250561593) 六六(微信 13138755620)
加入行业交流群:林南(微信 19250561593)

元宇宙数字产业服务平台
下载「陀螺科技」APP,获取前沿深度元宇宙讯息
























.jpg)